SYCL for Safety Practitioners – SYCL ADAS Applications Topology Explained
09 November 2020
SYCL for Safety Practitioners Series
Part 1 - An Introduction
Part 2 - SYCL for Automotive AI and ADAS applications
Part 3 - SYCL ADAS Applications Topology Explained
Introduction
Welcome to the third article in this series. In the first, I introduced this series of articles for Safety Practitioners assessing the SYCL™ open standard programming model. In the previous article, I talked about how SYCL can support many of the demands outlined in chapter 6 of the ISO 26262:2018 functional safety standard. In this article, I will show you how the SYCL stack topology can support functional safety. What do I mean by topology? Topology here means a large-scale structure with many clear distinct layers separated by API boundaries. In each layer there are further structures where data flows between components as well as up and down through the layers in the stack. The shape of the structure is mainly vertical with the application at the top. This article will show how this structure is well defined yet versatile to meet the needs of the automotive application and the demands of the safety practitioner.
SYCL supports functional safety design
What is it that makes the topology suitable for safety? Tomorrow's vehicles will have either semi- or fully autonomous systems within them – SAE L3 to L5. These will need to understand their operational environment in order to operate within the expected safety norm. To do this a vehicle’s ECU (its central computer) may process gigabytes of data from various sources (sensors or V2X communications) and combine that with an operational context it built in the previous seconds or minutes. In real-time, the application calculates the next iteration of decisions in tens of milliseconds. It recognizes objects, considers non-optimal driving environments, multiple evolutionary scenarios and degraded sensors. It prioritizes actions, negotiates (with other units), and builds avoidance strategies which humans can do naturally.
The CPU is a generalist computational device. While it can do a wide variety of tasks, it cannot necessarily perform some types of work very efficiently compared to specialist compute devices (sometimes called accelerators). These specialist compute devices can be used to offload that work, acting as co-processors supporting the CPU and performing operations such as matrix operations far faster than a CPU can. To operate and utilize these co-processors in a coordinated and efficient manner requires communication and synchronization. SYCL enables the synergy of these devices within the ADAS application or supporting maths and AI algorithm libraries. Table 1 lists some of the possible co-processors. When these devices are brought together with a CPU onto a SoC, it is called a heterogeneous platform.
|
Co-processor |
Purpose |
|
Vision |
Image processing |
|
AI |
Tensor / matrix convolutions |
|
CNN |
Convolutional Neural Networks for AI |
|
DSP |
Conversion of analog signals and digital signal processing |
|
GPU |
Scaled parallel data compute |
Table 1: SYCL target acceleration devices or Co-processor
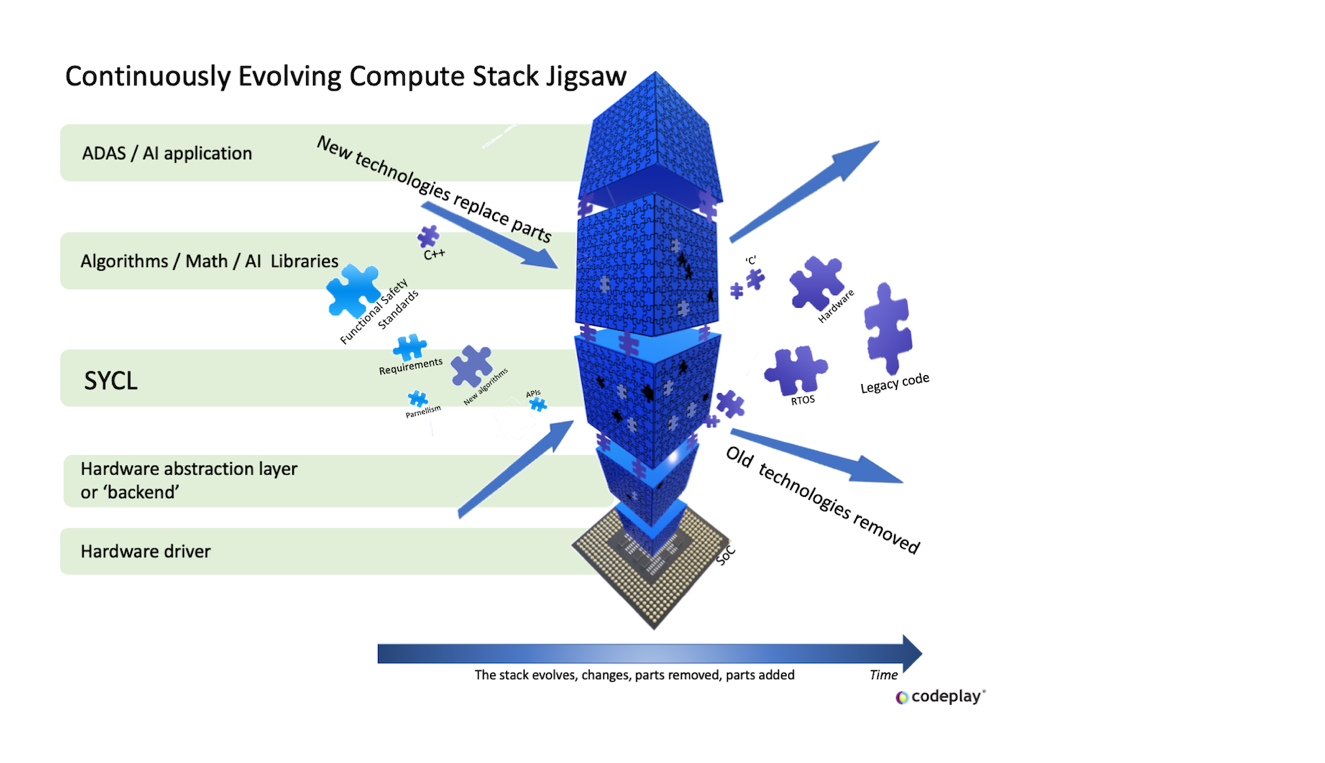
Figure 1: SYCL's layered application model
The diagram in figure 1 is used throughout the series of articles and summarizes the accelerated computing stack topology. A compute stack is a complex system and complexity is one of the concerns for safety practitioners. The ISO 26262:2018 Functional Safety Standard strongly encourages code oversight and review.
SYCL relieves multithreading anxiety
In the past, programming highly parallel architectures was a complicated and troubled affair. Scheduling and synchronizing parallel processes and arbitrating shared resources, while at the same time avoiding the introduction of errors that lead to issues such as deadlocks or livelocks, is a complex task that requires specialist skills and tools.
One of SYCL’s strengths in supporting safety is that it frees up the developer from managing the synchronization of data movement and kernel execution. SYCL supports data synchronization between kernels by automatically generating a data dependency graph and transferring data and scheduling work accordingly. A SYCL application is resilient to indeterministic program failure, which has troubled multi-threaded applications in the past. The SYCL data dependency graph ensures no deadlocks can occur between two distinct tasks, and developers can easily reason about the order of execution of the different tasks in the system.
Safety in layers
The stack is not necessarily developed by one company. Depending on the application and the software libraries employed there can be a diversity of developers involved at the higher layers of the stack. Fortunately, with access to the open-source and/or open-standard community, a safety practitioner is free to converse with the other parties if they need to. Apart from the hardware driver supplied by the SoC hardware vendor, the upper layers and the parts within a layer are broadly defined by open standard APIs.
As the stack is split up into clear layers and boundaries by the APIs, it can make it easier to break down the behavior of the stack and so be able to apply FMEAs at a component level or within a layer where components interact.
The lead provider of these open standard APIs is Khronos®. Khronos is a consortium of technology companies including some from the automotive industry who define API specifications for all to freely use. SYCL is a Khronos open standard, royalty free, API specification. Other relevant Khronos open standards used in the stack are:
- OpenCL™
- SPIR-V™ (a future article in the Safety for Practitioner series)
The stack is quite versatile. SYCL, depending on your needs, can be integrated with as many or as few libraries as needed. This means the stack can be streamlined for efficiency and safety. Some of the libraries and frameworks include, but are not limited to:
- SYCL-BLAS, an open-source BLAS kernel library
- Google's™ Tensorflow™ ML framework
- SYCL_DNN and SYCL-ML libraries.
- Intel® oneAPI ® libraries
This diverse set of libraries which support a SYCL backend continues to grow driven by the SYCL developer community.
The focus of SYCL development has been and continues to be on compute performance. The evidence is showing that a SYCL application is quite capable of meeting, and in some cases surpassing, the performance of its competitors in automotive applications. However, the current SYCL specifications and available implementations have been developed with little or no consideration for operational edge cases with safety mitigation plans. This is an important point which can be managed by a suitable safety concept for each use case.
Co-processors meet performance demands
The diagram in figure 2 reveals in greater detail the topology of the stack. A SYCL enabled application, like other applications, needs a CPU to execute. Previous automotive ECU solutions and supporting applications are no different. What is different is the addition of specialist co-processers. These co-processors enable the parallel tasks that might have been run on a CPU to be offloaded to a processor using many more cores with execution scaled up many times to a point way beyond what would be possible on a CPU. The diagram highlights the origin of the kernels (a kernel is a small program representing a 'task') and how they are sent down through the stack to the co-processors to be executed. Once a kernel has completed execution, its results are returned to the application for processing and decision making. Notice that the kernels can come from either the ADAS application or the libraries it uses.
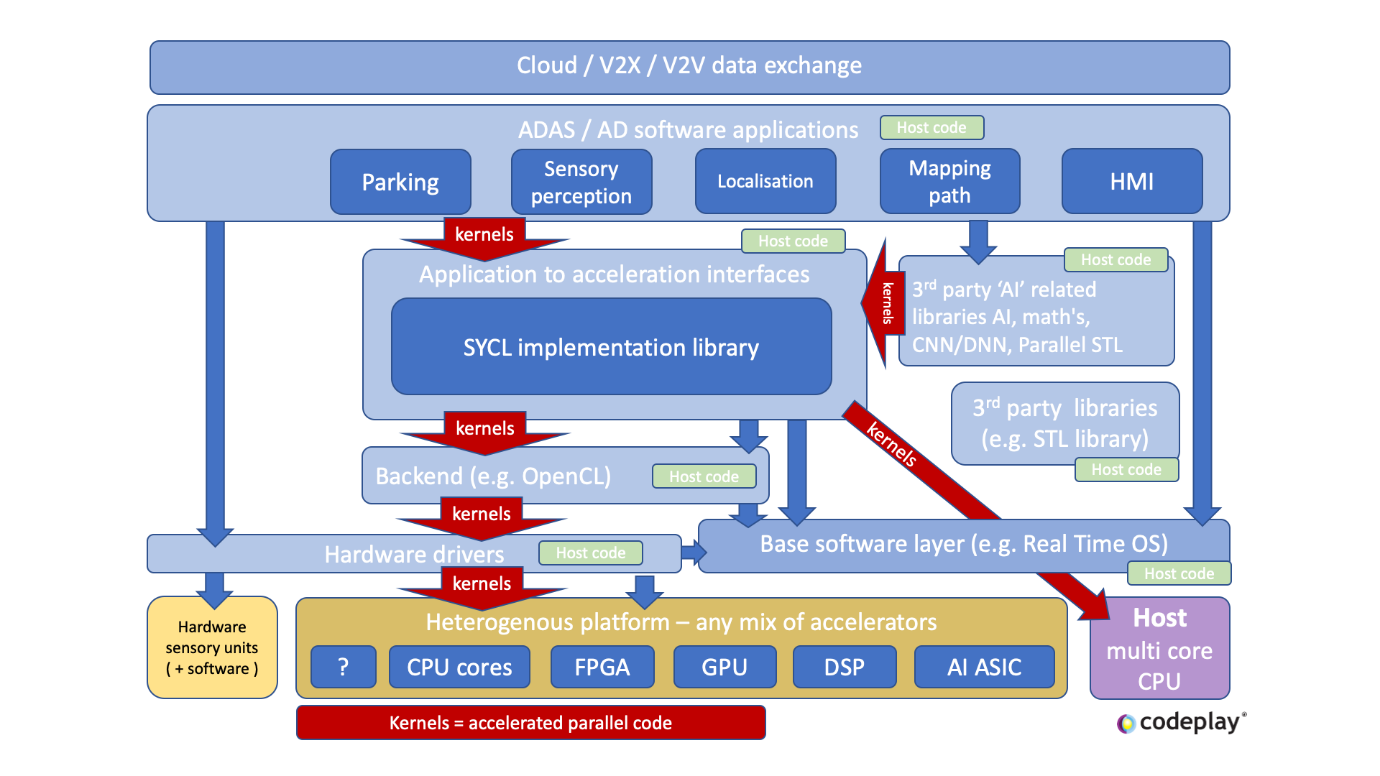
Figure 2: SYCL application in detail. Highlighting the execution paths of kernels.
To develop the application, an ADAS developer is unlikely to be concerned with the layers below the SYCL API. The developer will, however, need to understand the configuration of the chosen acceleration device or devices in order to get optimal performance. The safety practitioner will be concerned with what happens at all levels.
SYCL flow
With reference to figure 2, a developer has encapsulated a function of work to be performed on some data in a standard C++ lambda function or functor. On compilation of the code, the compiler identifies the function of work as a kernel program. The program is compiled for a specific co-processor. Compilation can take place at run time or offline. Offline compilation allows binaries to be prepared and verified by a toolchain before being embedded into the application to be executed when required. The SYCL toolchain can support any additional controls while reducing the size of the SYCL implementation.
The runtime automatically synchronizes the kernel’s execution with the host side code so that no further intervention is needed by the programmer, again reducing the introduction of systematic errors. Conceptually, the kernel is effectively generated at the top of stack in the application and passed down through the stack to the device once it is passed to the SYCL API. The single kernel or kernels are replicated and executed across the compute units in the device. On kernel execution completing, the results can be copied back to the host upon request, when the host application uses the designated buffers. The SYCL runtime implementation can use advanced data movement paths (e.g. DMA) or graph analysis techniques to keep the amount of copies back to the host to a minimum, and take advantage of special hardware architecture features that will improve performance.
SYCL customization enables a variety of safe applications
Like the upper layers of the stack, the SYCL layer can be customized. A conformant SYCL implementation must adhere to a version of the SYCL API specification, which for QM or a low ASIL level is seen to be the model for development and cost. For critical solutions, a SYCL implementation can have features removed where it makes sense to better fit with the ISO 26262 requirement to remove unnecessary code. While any SYCL implementation can be reduced by removing features, it can at the same time be enhanced with safety features to meet the demands of the safety case. The SYCL stack can also support additional safety features like behavioral monitors or alternative operational modes, for example, reaching a safe state.
A typical SYCL implementation like Codeplay’s ComputeCpp™ and the other parts above it in the stack are developed as SEooC components (referred to in automotive as “elements”). With the customer, the ComputeCpp runtime implementation can be customized to meet the needs of the safety use cases and the target hardware.
Safety in layers – Separation of Concerns
While it is generally the responsibility of the ADAS application developer to tune the application, Codeplay assists by performing tasks such as:
- Optimization of data set size, layout and movement (i.e. ensuring the total data set can be partitioned and moved across the system efficiently given the hardware resources available)
- Kernel fusion (i.e. combining multiple kernels to increase computational intensity)
- ND-range parameter tuning (i.e. optimal configuration of execution parameters to maximize hardware utilization)
- General SYCL development consultation and training
Codeplay can also enhance the SYCL implementation to target a specific device by adding support for hardware features such as:
- Specialised SoC acceleration features like DMA optimizations
- Caches or alternative memory spaces
The very nature of the SYCL stack supports opportunities for collaboration, inspection and improvement by other safety practitioners, the developer community and component vendors.
The notable independence of the SYCL stack from the hardware also allows the development of the application to be carried out in advance of any hardware-in-the-loop (HIL) development. This can allow developers to prove important safety verification gates in advance.
The layers in the stack are clearly defined by well-defined API boundaries. Such boundaries devolve clear responsibilities. At the SYCL layer boundary is the Khronos SYCL specification. The backend is easily identified by the Khronos OpenCL specification. At the higher layers, proprietary or open-source libraries to accelerate math or sensor fusion algorithms like these listed here have identifiable boundaries:
- SYCL-BLAS (Matrix Multiplication algorithms, Kalman filters etc)
- ISO C++ Parallel STL library
- Google's TensorFlow library
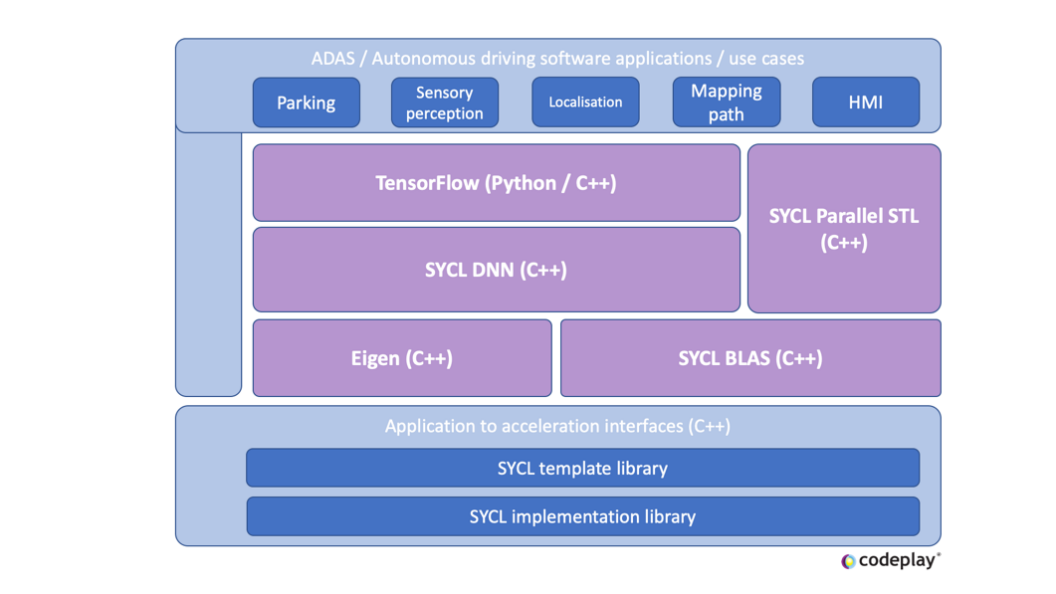
Figure 3: Example of a possible upper layer’s topology
At the top is the ADAS application. Depending on the nature of the application the top two layers shown in figure 1 are defined by the ADAS developer.
The distinct layers are well understood and can assist in the development of the safety design, integration and verification. The relatively new concern is how to manage the long-term maintenance of the software. The clear API boundaries allow either whole layers or parts within a layer to be debugged, fixed and replaced while leaving the other parts intact. This can include the hardware too. Importantly, the other layers’ verification strategies can remain in place.
SYCL stack resource management
A very important partner to the ADAS application and all the components in the stack is the RTOS. An RTOS is necessary for the overall resource management of the platform. All the services or applications, including the ADAS application, will have to negotiate with it to obtain their share of the resources. The RTOS manages the following: primary memory management strategies, thread allocations, communications etc. The RTOS accompanies the SYCL stack as part of the final solution.
An important consideration when utilizing an acceleration stack with an API like SYCL’s is the capability of the heterogeneous hardware and the supporting hardware drivers to support co-processor sharing. The SYCL implementations themselves assume they have sole access to a device, so the sharing of a device between processes must be implemented at a lower level, such as by the RTOS and the supporting hardware driver. The co-processor itself could be a limit to it being shared.
Even if the RTOS, hardware driver and co-processor allow sharing, it may not be viable to share the limited resources like the device’s local memory between several concurrent processes. The latency caused by the time-slicing of the device could severely impact performance. A major part of the latency impact would come from the suspension of a kernel’s state, the backing up of the state, so it could be switched out for another application’s kernel’s to re-start execution.
As part of sharing a capable solution, it is important the hardware driver should support multiple process entry. This requires the driver to be written in such a way to support separate re-entrant tasks.
SYCL supports fallback mechanisms
The topology of an ADAS application can be fixed or dynamic. SYCL allows an application to choose different co-processors for use at any time (if they are available). This is known as dynamic selection. If no devices are available at the time of the request, then the CPU can be used as the default acceleration device. The SYCL implementation is guaranteed to always select a valid device. This can be a good safety strategy to use should a co-processor fail, however an automotive application would likely use a fixed strategy, where it is set once and used forever.
Where the requirements and safety case have been established in advance of deployment, it is possible to remove features which are not required from a SYCL implementation to reduce the complexity and the scope safety rigor required. A few examples of the current implementation’s features that could be removed are:
- Online compilation
- The support for multiple SYCL out of order queues, replacing it with a single predictable queue mechanism to dispatch kernels
- Support for multiple contexts on the same device
- Image handling support
As of today, the SYCL implementations are feature-rich allowing for all possible uses at any time.
Conclusion - A SYCL stack supports safety
This overview of the SYCL topology does show that through the use of open standards, clear boundaries of responsibilities are well defined. Safety practitioners will be able to concentrate their safety analysis on small, clearly defined parts of the system individually, before considering the system as a whole when it is time for item integration.
From this article a safety practitioner could extrapolate and see the advantages and opportunities a SYCL development ecosystem provides:
- The APIs integral to the stack enable continuous verification at all levels of the ‘V’ process model
- Components can be verified individually or as an integrated system
- The stack is versatile to meet the needs of the safety case
- The SYCL specification and its implementations reduce the scope of testing required by providing one solution
for a range of applications
- This reduces code repetition or duplication by developers
The transparency of the SYCL stack is the differentiator in the domain of the automotive application development for ADAS and AD systems.
Its state-of-the-art design has been developed by experts from many diverse backgrounds. The topology of the SYCL stack is well-defined yet it is a customizable acceleration solution to meet the demands of tomorrow’s highly performance-critical applications. It allows applications to work across a wide range of devices, from HPC centres to power-efficient embedded systems needed for sensor fusion units in vehicles.
Contacts
If you would like to contribute, have any comments or questions then please do contact us via our contact form and we will reach out to you directly.
List of Safety Practitioner articles:
- Blog 1: SYCL for Safety Practitioners – Introduction
- Article 2: SYCL for Automotive AI and ADAS applications
- Future Article 4: The SYCL C++ Programmer
Acronyms list
|
Acronyms |
Description |
|
ADAS |
Advanced Driver Assistance Systems |
|
AD |
Autonomous Driving |
|
AI |
Artificial Intelligence |
|
API |
Application Programmable Interface, a frontend public-facing set of functions to a software library or component |
|
ASIL |
ISO 26262 Automotive Safety Integrity Level |
|
CNN |
Convolutional Neural Networks for AI |
|
CPU |
Central Processing Unit hardware compute device |
|
DPC++ |
Intel's SYCL implementation Data Parallel C++ |
|
DSP |
Digital Signal Processor |
|
ECU |
(Automotive) Electronic Control Unit |
|
FPGA |
Field Programmable Gate Array hardware compute device |
|
FMEA |
Failure Mode and Effects Analyses |
|
GPU |
Graphics Processing Unit hardware compute device |
|
HPC |
High Performance Compute |
|
ISO 26262 |
Automotive Functional Safety Standard 2018 |
|
OEM |
(Automotive) Original Equipment Manufacturer |
|
OpenCL |
Khronos software API specification OpenCL |
|
RTOS |
Real Time Operating System |
|
SAE |
Society of Automotive Engineers defines 6 levels of driving automation ranging from 0 (fully manual) to 5 (fully autonomous). |
|
SEooC |
ISO 26262 term System Engineered Out of Context of an automotive functional use case |
|
SoC |
System on Chip integrated circuit |
|
SYCL |
A Khronos API and implementation specification |
|
V2V |
Automotive vehicles exchange data with other vehicles |
|
V2X |
Automotive vehicles exchange data with road infrastructure |
List of useful URLs
Introduction to SYCL:
www.youtube.com/watch?v=XXejyI4-WEI&feature=youtu.be
SCYL programming learning material:
https://sycl.tech
Khronos learning resources on SYCL:
https://www.khronos.org/sycl/resources
ISO C++ and SYCL Join for the Future of Heterogeneous Programming
Codeplay:
www.codeplay.com
Intel DPC++:
Intel oneAPI
About the author
A generalist programmer with 24+ years of experience.
Illya works for Codeplay Software as a Principal Engineer since 2013 overseeing the development of tools chains for automotive semiconductor customers. He is the chair of the Khronos Safety Critical Advisory Forum (KSCAF) and a member of the Khronos OpenCL and Vulkan Safety Critical working groups. Illya is also a member of the MISRA C++ committee. Illya has a BSc (Hons) degree (in Electrical and Electronic Engineering) by the University of Surrey (UK) following a 4 years electronics apprenticeship at the MoD Royal Aircraft Establishment Farnborough (UK). After university he spent 12 years programming games, tool chains and profilers for major games consoles like Playstation 3 and Playstation Vita for Sony Computer Entertainment Europe followed by further 2 years in a Scottish indy games company improving performance and implementing anti-hack solutions for their open world multiplayer online video game.
About Codeplay
Codeplay are experts in accelerated software using SYCL on most hardware platforms. It understands what is required to create acceleration libraries that enable heterogonous platforms to operate AI and ADAS applications.
